
Hello
I'm Clark Teeple,
a Staff Systems Engineer
at Boston Dynamics
Harvard University
2016-2021
PhD in Engineering Sciences (Robotics)
PhD in Engineering Sciences (Robotics)
Harvard University
2016-2021
Harvard University
2016-2018
M.S. in Engineering Sciences (Mechanical Engineering)
Earned en route to the PhD.
M.S. in Engineering Sciences (Mechanical Engineering)
Harvard University
2016-2018
Earned en route to the PhD.
University of Michigan
2012-2016
B.S.E. in Mechanical Engineering
3.90 GPA, Graduated Summa Cum Laude
B.S.E. in Mechanical Engineering
University of Michigan
2012-2016
3.90 GPA, Graduated Summa Cum Laude
Boston Dynamics
2024-Present
Staff Systems Engineer
As a systems engineer working on perception and safety at Boston Dynamics, I am part of a team enabling next-generation robot performance with safety built-in from the start. Ensuring robots always interact safely with people around them is critical to Boston Dynamics's core mission, and an important part of our plan as we scale.
Boston Dynamics
Staff Systems Engineer
2024-Present
As a systems engineer working on perception and safety at Boston Dynamics, I am part of a team enabling next-generation robot performance with safety built-in from the start. Ensuring robots always interact safely with people around them is critical to Boston Dynamics's core mission, and an important part of our plan as we scale.
RightHand Robotics
2022-2024
Staff Hardware Engineer, R&D
Senior Hardware Engineer, R&D
As a hardware engineer in the R&D group, I utilize my cross-functional robotics expertise to develop products and features at the intersection of hardware and software. In my primary project, I am the technical lead for the development of a new high-performance, industrial-grade 3D camera product (recently announced as part of the RightPick 4 piece-picking system). I have also made countless smaller contributions to the RightPick codebase, including additional robot behavior improvements and bug fixes.
RightHand Robotics
Staff Hardware Engineer, R&D
Senior Hardware Engineer, R&D
2022-2024
As a hardware engineer in the R&D group, I utilize my cross-functional robotics expertise to develop products and features at the intersection of hardware and software. In my primary project, I am the technical lead for the development of a new high-performance, industrial-grade 3D camera product (recently announced as part of the RightPick 4 piece-picking system). I have also made countless smaller contributions to the RightPick codebase, including additional robot behavior improvements and bug fixes.
Harvard Microrobotics Lab
2021-2022
Postdoctoral Fellow
Advised by Prof. Robert Wood, I am continuing my work on soft manipulation with a new focus on using simulation
Harvard Microrobotics Lab
Postdoctoral Fellow
2021-2022
Advised by Prof. Robert Wood, I am continuing my work on soft manipulation with a new focus on using simulation
Harvard Microrobotics Lab
2016-2021
PhD Candidate
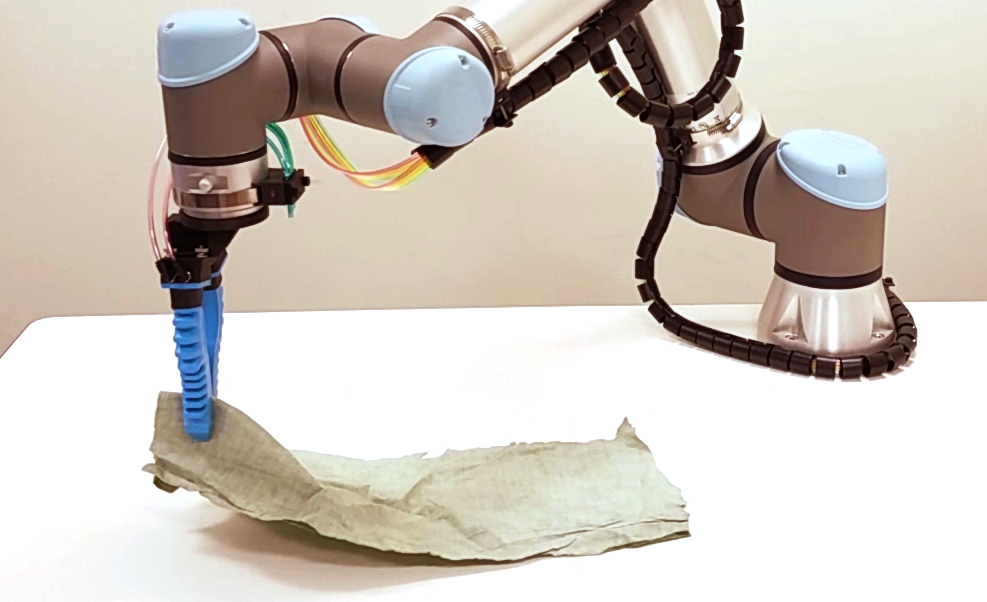
Advised by Prof. Robert Wood, I studied soft robotic hands for a variety of real-world applications including deep-sea sampling, precise grasping, and in-hand manipulation.
Harvard Microrobotics Lab
PhD Candidate
2016-2021
Advised by Prof. Robert Wood, I studied soft robotic hands for a variety of real-world applications including deep-sea sampling, precise grasping, and in-hand manipulation.





Technical Lead
RightPick 4 Industrial Camera Product, RightHand Robotics
2022-2024
Lead the development of a high-performance, industrial-grade 3D camera product as part of the RightPick 4 piece-picking system, and successfully brought it to market.
STEM Outreach Co-Lead
Harvard Microrobotics Lab, Harvard University
2016-2021
I help coordinate our lab's efforts to attend local STEM expos and science fairs. Our lab is excited about outreach, and I am excited about coordinating it!
Co-President
SEAS Graduate Council, Harvard University
2017-2019
As co-president of the SEAS-GC, I helped to plan and execute social, professional, and outreach events in an effort to improve student life at SEAS. In addition, I worked to change the focus and mission of the organization to appeal more to students, and lead efforts to improve visibility.
Bok Center Excellence in Teaching Award
Harvard University - 2019
NSF Graduate Research Fellowship
Harvard University - 2017-2020
RISE Best Paper Award
Research, Innovation, Service and Entrepreneurship (RISE), University of Michigan - 2016
Active Member of Tau Beta Pi Engineering Honor Society
University of Michigan - 2014-2016
Engineering Sciences 51 - Computer Aided Machine Design
Teaching Fellow, Harvard University
Fall 2018
An undergraduate-level class exploring the basics of mechanical engineering. In teams, students design, build, and test remote-controlled robots! I was in charge of two lab sections, held office hours, and graded assignments.
Jan. 2020
Guest Presenter
Coolidge Corner Theatre (Brookline, MA)
I presented exciting current research on soft robots, microrobots, and swarms as an introductions to the film Big Hero 6.
Nov. 2017, 2018, 2019
Judge
Newton Qualifier and Massachusetts Championship
FIRST Robotics Lego League (FLL)
I've judged all three areas (Robot design, project, and core values)
April 2016, 2017, 2018
STEM Expo Attendee
w/ Harvard Microrobotics Lab
We were part of the "Robot Zoo". We had a booth and showed off some cool demos of robots that we make in our lab.
March 2016, 2017, 2018, 2020
STEM Expo Attendee
Boston Public Schools Science Fair
w/ Harvard Microrobotics Lab
We had a booth and showed off some cool demos of robots that we make in our lab.